


This autopilot system costs around $7,000 new and works very well. However, it is very risky to use this autopilot on smaller or experimental aircraft because of the price of the unit. Our goal is to build one from individual in-house components, write our own software, and test it on an actual scale model aircraft.
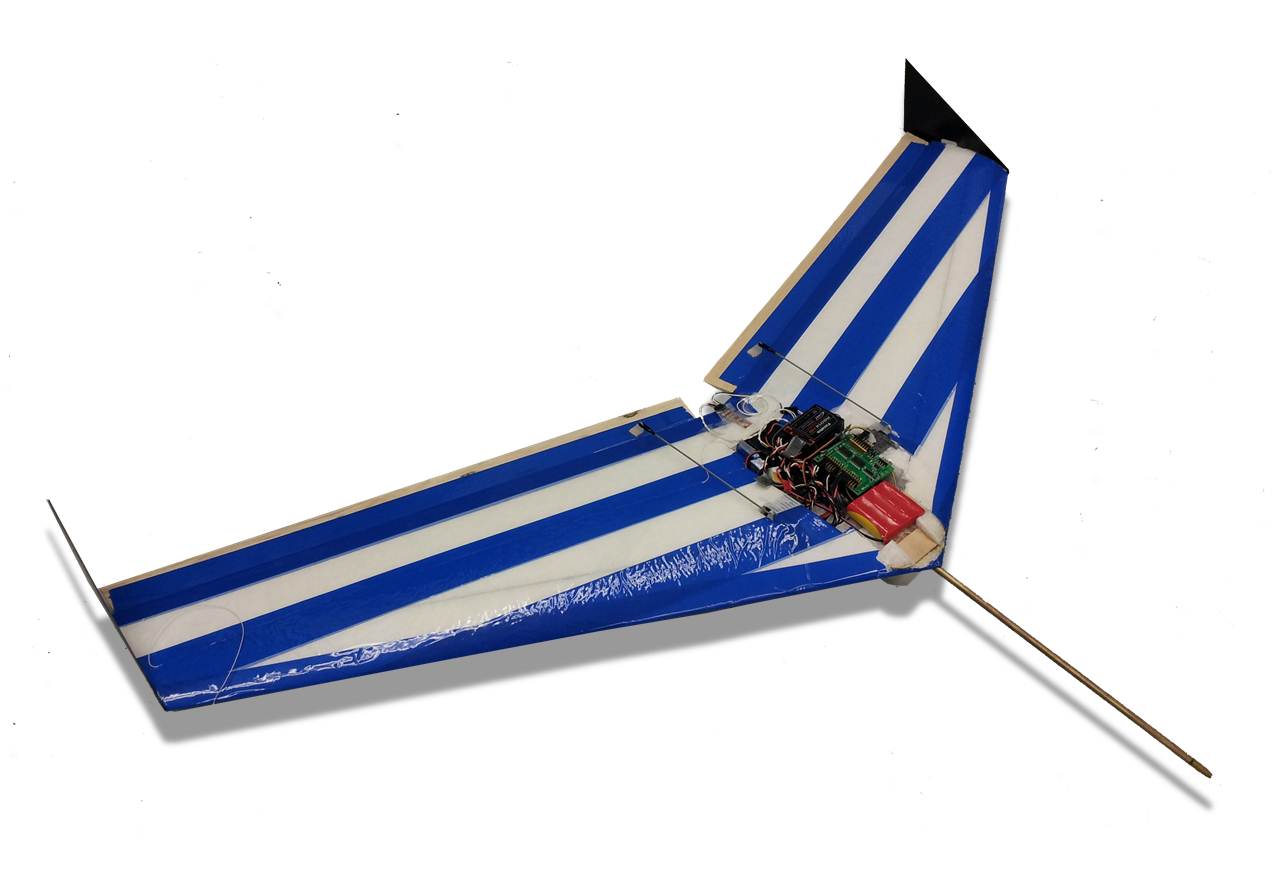
The main components of this project were state estimation, aircraft control, and hardware calibration/installation. The state was estimated using a triple axis sensor stick containing rate gyroscopes, accelerometers, and magnetometers. In addition, airspeed was measuring using a pitot-static probe and pressure transducer. A controller was designed to maintain airspeed and a desired bank angle using state feedback. This autopilot system was installed on a durable, flying wing glider known as a Zagi.
State Estimation >>