| Item | Cost |
| Zagi | $60.20 |
| Arduino Uno | $29.95 |
| Arduino Seeeduino | $24.95 |
| RxMux | $79.00 |
| 9 DOF Sensor Stick | $99.95 |
| Pressure Transducer | $19.95 |
| Servo x2 | $12.69 x2 |
| Total: | $339.38 |
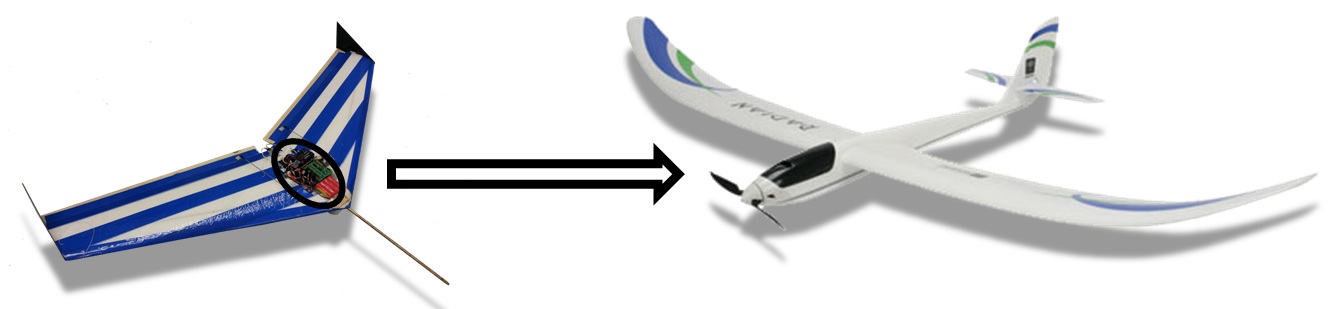
The autopilot system was successfully built and installed on the Zagi flying wing. The state estimator measured the states of the aircraft with minimal drift. The feedback controllers showed reasonable responses to wind inputs as well as changes in state. However, system integration turned out to me a major difficulty with this project. Although the flying wing was able to maintain reasonable gliding performance with just a radio control system aboard, once the autopilot system was installed performance was seriously degraded. The additional weight of the autopilot caused a significant increase in wing loading which requires that the aircraft fly at a higher speed to maintain steady, level flight. The effects of the extra weight were underestimated and the result was that flight testing became a difficult task. Although this system is considered to be inexpensive compared to commercially available autopilot systems, it was deemed too risky to test and debug the autopilot system by launching from a higher location.
To combat these system integration problems, the team plans on using this same autopilot system on a slightly larger aircraft. This was not performed during the scope of this project because of time constrains. Using this autopilot system on a larger aircraft should cause a smaller marginal increase in wing loading compared to that of the Zagi. This would allow testing of autopilot to commence safely.